
当我们再次翻开历史的胶片,2010年NBA总决赛第七场那种窒息般的紧张感依然扑面而来。对于真正的篮球迷来说,“黄绿大战”不仅代表着豪门恩怨,更是硬汉篮球的终极图腾。在那片没有超级球队捷径的赛场上,凯文·加内特的怒吼、保罗·皮尔斯的单挑以及雷·阿伦的冷血,构建了我们青春里最热血的篮球记忆。本文将穿越时空,带你复盘当年那些决定冠军归属的经典对位瞬间。
板块一:禁区绞杀战,狼王的钢筋铁骨
在那轮系列赛中,凯尔特人引以为傲的防守体系核心正是凯文·加内特。面对保罗·加索尔和拜纳姆组成的双塔,KG没有丝毫退让。在这场关键战役中,加内特不仅在防守端遮天蔽日,进攻端更是极具侵略性。加内特硬吃加索尔的这一幕成为了内线肉搏的经典写照,他利用灵活的脚步和精准的中距离,一次次撕开湖人引以为傲的禁区防线。此时的加内特膝盖尚在巅峰尾巴,他在禁区的统治力是凯尔特人能咬住比分的关键所在。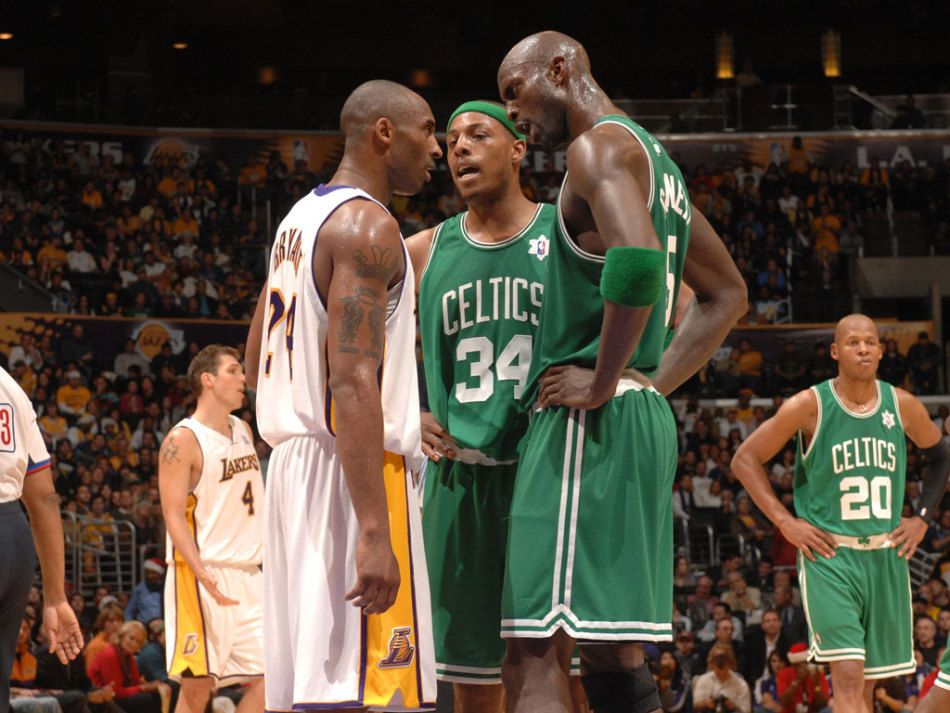
分析这一时期的对抗,我们不得不提实力与战意。加内特与加索尔的对决已不仅是技巧比拼,更是心理博弈。虽然湖人在内线高度上占优,但绿军利用了拉希德·华莱士的纠缠和帕金斯的顶防,最大程度消耗对手。主场优势在当时的北岸花园被发挥到极致,震耳欲聋的呼声让客队球员极易失误。至于伤停影响,最致命的莫过于帕金斯在总决赛第七场的突然受伤报销,这直接导致绿军内线轮换吃紧,最终被湖人逆转。
板块二:外线冷血华尔兹,真理与君子剑
如果说内线的绞杀是肉搏,那么外线的对决就是手术刀般的解剖。保罗·皮尔斯作为“真理”,在进攻端展现了他万花筒般的技巧。图片中皮尔斯杀入敌阵的画面极具代表性,他利用强壮的身体扛开防守,在失去平衡的情况下依然将球送入篮筐,完美诠释了地板流进攻的精髓。另一边,雷阿伦跨越费舍尔的瞬间则像是一首优雅的诗篇,即便是面对老鱼死缠烂打的贴身防守,雷·阿伦依然通过不知疲倦的无球跑动和队友的电梯门战术,获得那一线出手空间。
在复盘皮尔斯缠斗费舍尔这个对位时,分析点在于实力与战意:费舍尔虽然脚步不如阿伦快,但核心力量极强,经常造成进攻犯规;而皮尔斯则是绿军关键时刻最稳定的硬解点。从战意层面看,2008年的失利让科比和湖人众将憋着一口气,而绿军三巨头则想抓住巅峰尾巴再夺一冠,双方在主场的心理博弈异常激烈。关于伤停,需要留意的是虽然绿军外线经验丰富,但隆多彼时面对老鱼并未占得太多便宜,且当时的医疗条件对于首发球员的消耗恢复极为不利。
板块三:生死时刻的巨星球,永恒的冠军之心
比赛进入最后的决胜期,真正考验超级巨星心理素质的时刻到了。凯文·加内特面对加索尔的贴身紧逼,并没有选择强行背打,而是做出了一个后卫般的篮下拉杆动作,避开了补防,将球放进,这一球尽显其身体柔韧性。而在另一个进攻回合中,皮尔斯在三分线外持球,面对费舍尔的扑防,他做出了经典的刺探步,随即干拔出手——真理腾空出手,皮球划出一道彩虹,空心入网。那一年的科比虽然在防守端倾尽所有,但在进攻端面对雷·阿伦和托尼·阿伦的轮番撕咬,体力消耗极大。而加内特在关键时刻的冷静面对加索尔中投命中,更是展现了其大心脏本色。
回顾斯台普斯的那场抢七大战,实力对比非常微妙:双方防守强度极高,甚至导致命中率惨不忍睹,但这正是90年代硬派篮球遗风的体现。从战意上看,这是凯尔特人三巨头最后的辉煌尝试,也是湖人复仇2008耻辱的正名之战。尽管绿军最终在抢七中因篮板球失守而饮恨,但加内特禁区无敌的既视感依然让所有球迷动容。







